




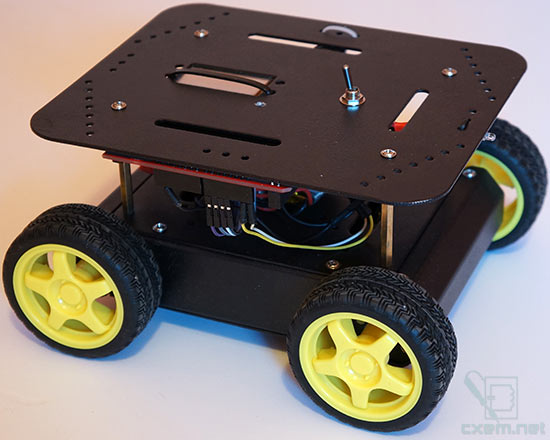
FEZ Panda II RC car (Android control via Bluetooth)
The first part of the project CxemCAR is here. There are also the source code for Android (Java Eclipse) and other useful information.
In this article, I will describe the assembly CxemCAR for the mcu with .NET Micro Framework core.
The controller is used with .NET Micro Framework: FEZ Panda II, but you may use any controller works with .NET Micro Framework core (Netduino, GHI Electronics board's and other)
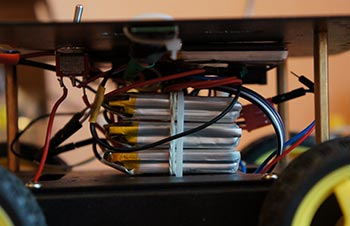
Power DC motors are from the 3xLi-Po battery 3.7V 1100 mAh. The controller is powered by a single 3.7V Li-Po battery (although the required 5V, but works fine on 3.7V). Power supply of Bluetooth module is taken from the FEZ board.
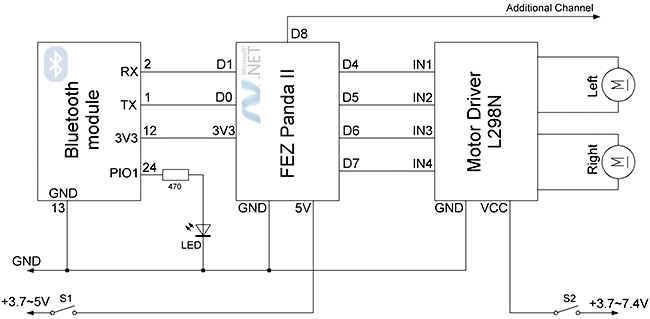
Wiring diagram:
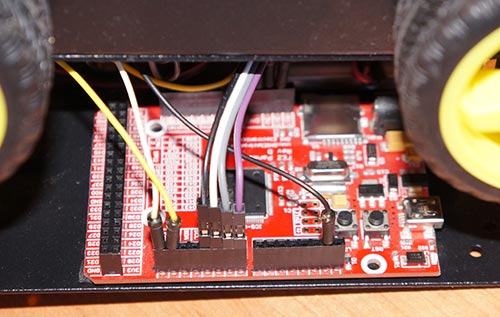
FEZ Panda II board to the chassis 4WD stuck with 2-sided scotch tape:
Software for FEZ Panda II is simple: in the loop reads recieved data from the UART and make arrays. Once we recieve end symbol transmission (\ r or \ t), the data are converted and move to functions Control4WD() or Flash_Op()
Project for .NET Micro Framework on GitHub
Author: Koltykov A.V.