




DIY intervalometer for Sony NEX
I decided to make a DIY intervalometer for my Sony NEX 5N camera so that I could do time-lapse photography. This intervalometer should work with most Sony cameras: NEX, Alpha and other. To work intervalometer used infrared LED
To built intervalometer you need:
Arduino Nano (or Arduino-compability)
Serial LCD
Joystick Module
IR Led and resistor ~200 Ohm
Switch
Push Button
Plastic enclosure
Battery 9V
Schematic:
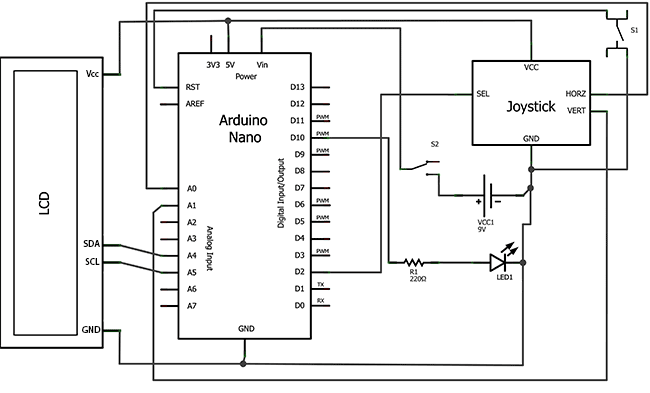
Serial LCD has 4 output: GND, VCC, SDA, SCL. SDA (data) connect to Arduino Analog In 4, SCL (clock) connect to Analog In 5. Vcc connect to 5V Arduino, and GND connect to GND Arduino.
The joystick is connected by five wires: axis X (connect to Analog IN 0), axis Y (to Analog IN 1), axis/button Z (to Digital IN 2), supply Vcc and GND.
Connection Diagram:

Circuit is powered by 9V battery. Battery positive output connected to the input Vin Arduino. Arduino has a built-5V voltage converter that we need to power the Serial LCD. The anode of the IR LED is connected through current limiting resistor and connected to 10-pin Arduino. Cathode of the IR LED connected to GND.

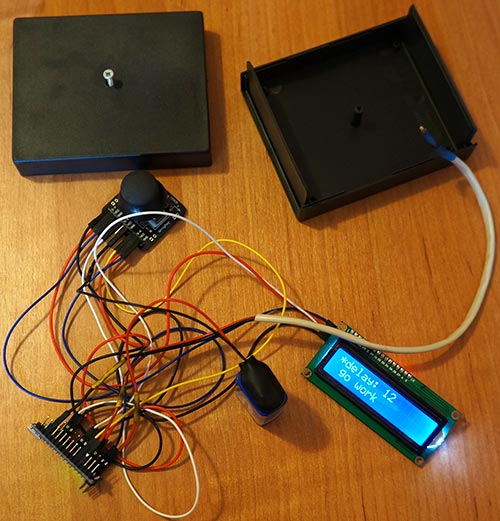
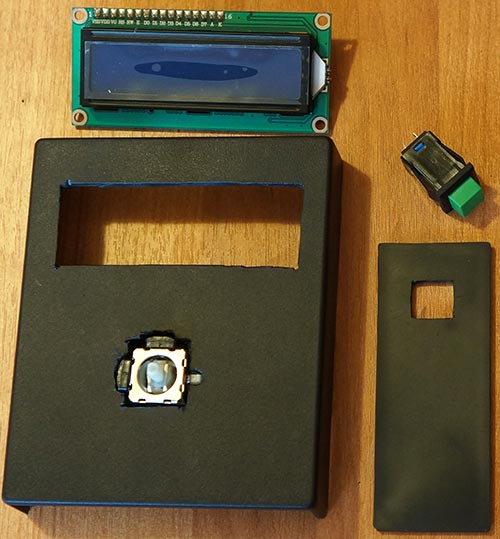
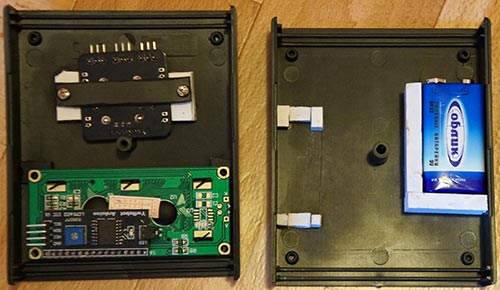
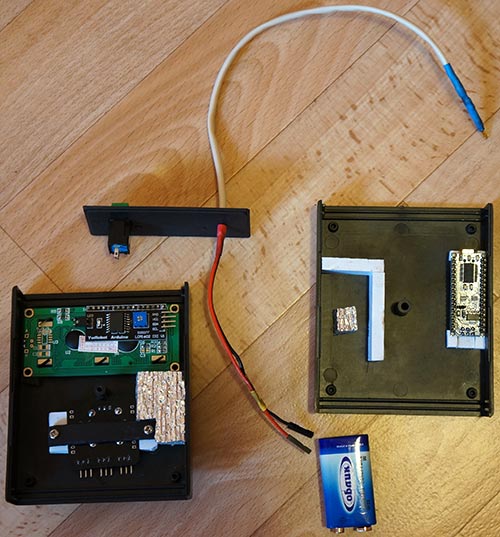
Assembling:


Software
To save battery life in the software has a function the LCD backlight off. When you press any key, the LCD backlight turn on.
Source code:
// Article https://english.cxem.net/arduino/arduino6.php
// Version 1.0
#include "Wire.h"
#include "LiquidCrystal_I2C.h"
#define axis_X 0 // axis X of Joystic connected to Analog 0
#define axis_Y 1 // axis Y of Joystic connected to Analog 1
#define axis_Z 2 // axis-button Z of Joystic connected to Digital 2
#define pinIRLED 10 // IR LED
#define LEDgreen 13 // onboard LED
#define autoOFF 10 // autoOFF backlight LCD
LiquidCrystal_I2C lcd(0x27,16,2); // set the LCD address to 0x27 for a 16 chars and 2 line display
int value_X, value_Y, value_Z = 0; // axis values
int pos = 0; // current position (0 - delay, 1 - work)
int interval = 1; // pause between shots (sec)
int cntPict = 0; // shots count
boolean working = false;
unsigned long currentTime;
unsigned long TimeShot, TimeLCDOff;
void setup()
{
pinMode(axis_Z, INPUT); // Joystic button
pinMode(pinIRLED, OUTPUT); // IR LED
lcd.init(); // init LCD
lcd.backlight(); // turn LCD backlight ON
lcd.clear(); // clear LCD
show_menu(); // function show menu
currentTime = millis();
TimeShot = currentTime; // shots timer
TimeLCDOff = currentTime; // backlight timer
//Serial.begin(115200);
}
void loop()
{
value_X = analogRead(axis_X); // read the analog value of the X axis
value_Y = analogRead(axis_Y); // read the analog value of the Y axis
value_Z = digitalRead(axis_Z); // read the digital value of the Z axis (button)
value_Z = value_Z ^ 1; // invert the value
if(working == false){
if(value_Y > 540){ // joystick up
pos = 0;
lcd.backlight(); // LCD backlight ON
TimeLCDOff = currentTime; // new value of TimeLCDOff
show_menu();
}
else if(value_Y < 500){ // joystick down
pos = 1;
lcd.backlight(); // LCD backlight ON
TimeLCDOff = currentTime; // new value of TimeLCDOff
show_menu();
}
if(value_X > 530){ // joystick left
lcd.backlight(); // LCD backlight ON
TimeLCDOff = currentTime; // new value of TimeLCDOff
if(pos == 0){
--interval;
if(value_X > 900) interval = interval-10; // joystick full left
if(interval < 1) interval = 1;
}
show_menu();
}
else if(value_X < 490){ // joystick right
lcd.backlight(); // LCD backlight ON
TimeLCDOff = currentTime; // new value of TimeLCDOff
if(pos == 0) {
++interval;
if(value_X < 100) interval = interval+10; // joystick full right
}
show_menu();
}
}
if(value_Z == 1){ // joystick button press
lcd.backlight(); // LCD backlight ON
TimeLCDOff = currentTime;
if(working == true){
working = false;
pos = 0;
show_menu();
}
if(pos == 1) show_working(); // turn on work mode
}
delay(200);
currentTime = millis();
if(working == true){
if(currentTime >= (TimeShot + (interval*1000))){
digitalWrite(LEDgreen, HIGH); // blink onboard LED
delay(100);
digitalWrite(LEDgreen, LOW);
takePicture(); // send IR
TimeShot = currentTime;
++cntPict; // increase the counter shots
show_working(); // refresh LCD
}
}
if(currentTime >= (TimeLCDOff + (autoOFF*1000))){
lcd.noBacklight(); // LCD backlight OFF
}
}
void show_menu()
{
cntPict = 0; // zero out counter shots
lcd.clear();
lcd.setCursor(0, pos);
lcd.print("*"); // current position
lcd.setCursor(1, 0);
lcd.print("delay:");
lcd.setCursor(8, 0);
lcd.print(interval);
lcd.setCursor(1, 1);
lcd.print("go work");
}
void show_working()
{
lcd.clear();
lcd.setCursor(3, 0);
lcd.print("working...");
lcd.setCursor(2, 1);
lcd.print("shots:");
lcd.setCursor(9, 1);
lcd.print(cntPict);
working = true;
}
void pulseON(int pulseTime) {
unsigned long endPulse = micros() + pulseTime; // create the microseconds to pulse for
while( micros() < endPulse) {
digitalWrite(pinIRLED, HIGH); // turn IR on
delayMicroseconds(13); // half the clock cycle for 38Khz - e.g. the 'on' part of our wave
digitalWrite(pinIRLED, LOW); // turn IR off
delayMicroseconds(13); // delay for the other half of the cycle to generate wave/ oscillation
}
}
void pulseOFF(unsigned long startDelay) {
unsigned long endDelay = micros() + startDelay; // create the microseconds to delay for
while(micros() < endDelay);
}
void takePicture() {
for (int i=0; i < 2; i++) { // impulse send twice
pulseON(2336);
pulseOFF(646);
.......
.......
.......
pulseON(99);
pulseOFF(646);
}
}
Video:
Download source code for Arduino
Author: Koltykov A.V.